Metode pentru determinarea bcm-ului corpului uman. Determinarea centrului general de greutate al corpului uman: Orientări pentru studiul cursului de biomecanică pentru studenții Facultății de Educație Fizică. Distribuția masei în corpul uman
Citeste si
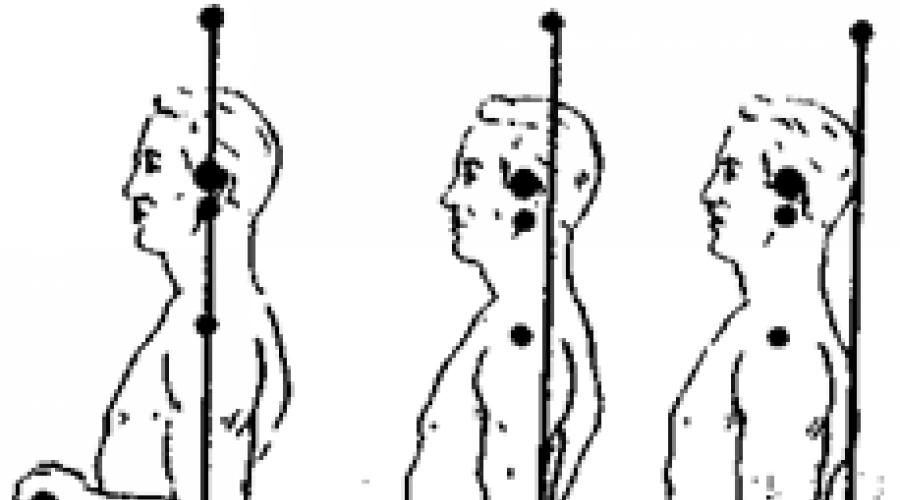
Funcția extremităților inferioare ale unei persoane, dacă excludem multe exerciții fizice, este determinată în principal de sprijin (poziția în picioare) și de locomoție (mers, alergare). În ambele cazuri, funcția extremităților inferioare, spre deosebire de cele superioare, este influențată semnificativ de centrul de greutate (CG) comun al corpului uman (Fig. 2.6).
Orez. 2.6. Locația centrului comun de greutate la tipuri variate permanent: 1 - cu stres; 2 - cu antropometric; 3 - când calm
În multe probleme de mecanică, este convenabil și permis să se ia în considerare masa unui corp ca și cum ar fi concentrată într-un punct - centrul de greutate (CG). Deoarece trebuie să analizăm forțele care acționează asupra corpului uman în timpul execuției exercițiu si in picioare (repaus), ar trebui sa stim unde este CT-ul la o persoana in norma si in patologie (scolioza, coxartroza, paralizia cerebrala, amputatia de membru etc.).
În biomecanica generală, este important să se studieze locația centrului de greutate (CG) al corpului, proiecția acestuia pe zona de sprijin, precum și relația spațială dintre vectorul CG și diverse articulații (Fig. 2.7). Acest lucru vă permite să studiați posibilitățile de blocare a articulațiilor, să evaluați modificările compensatorii, adaptative ale sistemului musculo-scheletic (MSA). La bărbații adulți (în medie), BCT este situat la 15 mm în spatele marginii anterioare-inferioare a corpului celei de-a cincea vertebre lombare. La femei, CT, în medie, este situat la 55 mm în fața marginii anterioare-inferioare a primei vertebre sacrale (Fig. 2.8).
În plan frontal, BCT este ușor (cu 2,6 mm la bărbați și 1,3 mm la femei) deplasat spre dreapta, adică. piciorul drept ia o sarcină ceva mai mare decât cea din stânga.

Orez. 2.7. Tipuri de poziție a corpului uman în picioare: 1 - pozitia antropometrica; 2 - poziție calmă; 3 - poziție tensionată: Un cerc cu un punct în centru, situat în pelvis, arată poziția centrului general de greutate al corpului; în zona capului - poziția centrului de greutate al capului; în zona mâinii - poziția centrului de greutate comun al mâinii. Punctele negre arată axele transversale ale articulațiilor superioare și membrele inferioare, precum și articulația atlanto-occipitală
Orez. 2.8. Locație centrală
severitate (CT): a - la bărbați; b - la femei
Centrul general de greutate (GCT) al corpului este compus din centrele de greutate ale părților individuale ale corpului (centre parțiale de greutate) (Fig. 2.9). Prin urmare, atunci când se deplasează și se mișcă masa părților corpului, centrul de greutate comun se mișcă, dar pentru a menține echilibrul, proiecția sa nu ar trebui să depășească zona suportului.

Orez. 2.9. Locația centrelor de greutate ale părților individuale ale corpului

Orez. 2.10. Poziția centrului general de greutate al corpului: a - la bărbați de aceeași înălțime, dar fizic diferit; folosit de bărbați creștere diferită; c - la bărbați și femei
Înălțimea poziției OCT y oameni diferiti variază semnificativ în funcție de o serie de factori, care includ în primul rând sexul, vârsta, fizicul etc. (Fig. 2.10).
La femei, BCT este de obicei „puțin mai scăzut decât la bărbați (vezi Fig. 2.8).
La copiii mici, BCT-ul corpului este situat mai mare decât la adulți.
Când poziția relativă a părților corpului se modifică, proiecția BCT-ului său se schimbă și ea (Fig. 2.11). În același timp, se modifică și stabilitatea corpului. În practicarea sporturilor (exerciții de învățare și antrenament) și la efectuarea exercițiilor de gimnastică terapeutică, această problemă este foarte importantă, deoarece cu o stabilitate corporală mai mare, mișcările cu amplitudine mai mare pot fi efectuate fără a perturba echilibrul.

Orez. 2.11. Poziția centrului de greutate comun în diferite poziții ale corpului
Stabilitatea corpului este determinată de mărimea zonei de sprijin, înălțimea bct-ului corpului și locația trecerii verticalei, coborâtă din bct, în interiorul zonei de sprijin (vezi Fig. 2.7).
Cum mai multă zonă suport și cu cât BCT-ul corpului este mai mic, cu atât stabilitatea corpului este mai mare.O expresie cantitativă a gradului de stabilitate a corpului într-o anumită poziție este unghi de stabilitate(UU). UU se numește unghiul format de verticală, coborâtă de la bct a corpului și o linie dreaptă trasă de la bct a corpului până la marginea zonei de sprijin (Fig. 2.12). Cu cât unghiul de stabilitate este mai mare, cu atât gradul de stabilitate al corpului este mai mare.

Orez. 2.12. Unghiuri de stabilitate la Orez. 2.13. Umerii gravitației
efectuarea exerciţiului „sfoară”: în raport cu axele transversale
a - unghi de stabilitate spate; rotație în șold, genunchi
p - unghiul de stabilitate înainte; și articulațiile gleznei de sprijin
R - gravitatea piciorului patinatorului
(conform lui M.F. Ivanitsky)
Verticala, coborâtă din BCT-ul corpului, trece la o oarecare distanță de axele de rotație ale articulațiilor. În acest sens, forța gravitației în orice poziție a corpului are o anumită valoare în raport cu fiecare articulație. momentul de rotatie egal cu produsul mărimii forței gravitaționale pe umărul său. Umărul gravitației este o perpendiculară trasă din centrul articulației spre verticală, coborâtă din bct-ul corpului (Fig. 2.13). Cu cât brațul gravitației este mai mare, cu atât este mai mare momentul de rotație pe care îl are în raport cu articulația.
Masa părților corpului este determinată în diferite moduri. Dacă masa absolută a părților corpului variază semnificativ între diferite persoane, atunci masa relativă, exprimată ca procent, este destul de constantă (a se vedea tabelul 5.1).
De mare importanță sunt datele despre masa părților corpului, precum și despre localizarea centrelor parțiale de greutate și a momentelor de inerție în medicină (pentru proiectarea protezelor, pantofi ortopedici etc.) și în sport (pentru proiectarea de echipamente sportive, încălțăminte etc.).
Descrieți poziția corpului uman căi diferite. Vă prezentăm una dintre cele mai convenabile, dezvoltată de V. T. Nazarov (1974) și bazată pe lucrările lui G. V. Korenev (1964) privind mecanica unui corp controlat. Poziția corpului uman în spațiu este descrisă în acest caz prin locația, orientarea și postura sa.
Locul corpului caracterizează în ce parte a spațiului (unde exact - de exemplu, în ce parte a stadionului, a încăperii) se află în acest moment Uman. Pentru a determina locul corpului, este suficient să indicați trei coordonate ale oricărui punct al corpului într-un sistem de coordonate fix. De obicei, este convenabil să alegeți centrul de masă comun al corpului (MCM) ca un astfel de punct, asociind cu acesta originea altui sistem de coordonate în mișcare, ale cărui axe sunt orientate în același mod ca axele fixe. sistem.
Orientarea corpului caracterizează rotația acestuia față de un sistem de coordonate fix (cu susul în jos, cu susul în jos, pe orizontală etc.). Poziția corpului caracterizează poziția relativă a legăturilor corpului unul față de celălalt. Determinarea locului corpului nu este de obicei asociată cu mari dificultăți. Determinarea orientării corpului este o sarcină mult mai dificilă, mai ales în cazul posturilor complexe. Acest lucru se explică prin faptul că din punctul de vedere al mecanicii, corpul uman este un corp de configurație variabilă (V. T. Nazarov, 1974). Pentru astfel de corpuri, conceptul orientării lor în spațiu nu este strict.
Să ne amintim cum sunt determinate planurile și axele principale ale corpului uman (vezi, de exemplu, VV Bunak, 1941) (Fig. 1).
Planurile principale ale corpului sunt orientate într-un sistem de trei axe reciproc perpendiculare: verticală și două orizontale - transversale și adânci, sau anterior-posterior.
Planul vertical care trece prin liniile mediane și vertebrale anterioare, precum și orice plan paralel cu acesta, se numesc sagital. Ele împart corpul în părți din dreapta și din stânga.
Planul vertical care trece perpendicular pe sagital, precum și orice plan paralel cu acesta, se numesc frontal. Ele împart corpul în părți anterioare și posterioare.
Planurile orizontale sunt perpendiculare pe aceste două planuri și se numesc transversale (transversale). Ele împart corpul în părți superioare și inferioare.
Din păcate, principalele planuri și axele anatomice nu sunt foarte potrivite pentru a descrie multe mișcări umane. Problema aici este că un sistem de coordonate trebuie cumva să fie asociat cu corpul uman, astfel încât o schimbare a orientării acestui sistem să reflecte o schimbare a orientării corpului.
MS Lukin (1964) a propus în acest scop să determine axa longitudinală a corpului după cum urmează. Corpul uman (în picioare în sus) este împărțit de un plan orizontal în două jumătăți egale în greutate. Linia care leagă centrele de masă ale jumătății superioare și inferioare a corpului (și care trece prin GCM) formează axa longitudinală a corpului (OY). Celelalte două axe (OX și OZ) trebuie să fie perpendiculare pe acesta și să înceapă de la GCM. Axa anterior-posterior este îndreptată paralel cu planul de simetrie al pelvisului, iar axa transversală este perpendiculară pe acesta.
Nu este întotdeauna convenabil să luăm centrul de masă al corpului ca origine a sistemelor de coordonate asociate corpului: poziția sa este destul de dificil de determinat, când postura se schimbă, GCM-ul se schimbă și poate chiar să depășească corpul. Prin urmare, ca repere antropometrice fixe, cu care este convenabil să se asocieze originea sistemului de coordonate, diverși autori au propus:
a) ieșirea canalului sacral (între coarnele sacrale), care este ușor de palpabil. Deoarece sacrul este o formațiune rigidă, sistemul de coordonate care începe în acest punct este bine orientat: axa verticală OY este îndreptată în sus de-a lungul sacrului, OX frontală este la stânga, axa sagitală OZ este înainte (Panjabietal., 1974) ;
b) vârful procesului spinos al celei de-a cincea vertebre lombare (A. N. Laputin, 1976) este un punct foarte aproape de centrul de masă al corpului unei persoane care stă într-o poziție normală.
Pentru a determina orientarea corpului este necesar să se asocieze două sisteme de coordonate cu acesta, având originea în același punct. Axele uneia dintre ele rămân paralele cu sistemul de coordonate fix (în raport cu care se determină locul corpului); axele celui de-al doilea sunt legate de corp. Orientarea corpului în acest caz este caracterizată de trei unghiuri Euler, care pot fi folosite pentru a trece de la un sistem de coordonate la altul.
Orezeu. Planurile și axele de bază ale corpului uman.
Caracteristicile inerțiale dezvăluie care sunt trăsăturile corpului uman și ale corpurilor mișcate de acesta în interacțiunile lor. Păstrarea și schimbarea vitezei depind de caracteristicile inerțiale. Aceasta este masa, momentul de inerție, de obicei neînregistrat direct. Se determină datele pe baza cărora se calculează aceste caracteristici.
Greutatea corporală (t) se determină prin cântărire. Cunoscând din greutatea corpului gravitația acestuia (G) și accelerația în cădere liberă a corpului (g),
G definește masa:
T=G/g.
Distribuția maselor într-un corp este într-o anumită măsură caracterizată de poziția centrului său de greutate comun (CG). Se utilizează o determinare experimentală (experimentală) a poziției BCT și una calculată.
Una dintre cele mai precise metode experimentale este cântărirea unei persoane pe o platformă triunghiulară (Fig. 2) într-o poziție dată.
Orez. 2. Determinarea poziției VCTcorpul uman cântărind pe scânduriformă (după G. Hochmuth)

Poziția necesară este stabilită în două moduri. În prima metodă, poza este copiată din cadrul filmului, mărind-o la dimensiunea naturală. Pe acest desen, care se află pe platformă, subiectul se întinde, luând o ipostază corespunzătoare conturului aplicat. În a doua metodă, unghiurile din articulațiile mari ale corpului (umăr, cot, șold, genunchi, gleznă) se măsoară pe rama filmului și, cu ajutorul goniometrelor, se dă subiectului pe platformă postura necesară.
Determinarea experimentală se efectuează și pe modele. Modelul lui Abalakov este o figurină umană construită în conformitate cu proporțiile medii ale corpului (0,1 mărimea corpului și 0,001 greutate) Figurina este așezată într-o poziție dată pe o foaie de hârtie cu contururi de poziție (Fig. 3, a) suport Despre platforma până când BCT-ul modelului coincide cu punctul de suspensie al platformei Prin apăsarea de jos pe acul din centrul platformei se străpunge o coală de hârtie în punctul în care se află BCT.
De asemenea, puteți aplica modelul de balama O. Fisher, care vă permite să determinați poziția BCT în planul anterior-posterior (Fig. 3, b)
Masa este o măsură a inerției unui corp în timpul mișcării de translație. Se măsoară prin raportul dintre forța aplicată șiaccelerația pe care o provoacă:
m=F/a; [m]=M
Măsurarea masei aici se bazează pe a doua lege a lui Newton: modificarea mișcării este proporțională cu exteriorul forța de acționareși are loc în direcția în care se aplică această forță.
- 97,00 KbPartea teoretică.
Centrul de masă corp solid este un punct fix bine definit care nu își schimbă poziția față de corp. Centrul de masă al sistemului de corpuri (corpul uman - sistem biomecanic, format din legături) își poate schimba poziția dacă distanțele dintre punctele acestui sistem se modifică.
În biomecanică, se disting centrele de masă ale legăturilor individuale ale corpului (de exemplu, piciorul inferior sau antebrațul) și centrul de masă al întregului corp.
Centrul de greutate al unei legături este un punct imaginar căruia i se aplică rezultanta forțelor gravitaționale ale tuturor particulelor legăturii. Momentele tuturor forțelor gravitaționale ale unui Even în raport cu CG-ul său sunt echilibrate reciproc, suma lor este egală cu zero. Aceasta presupune două metode de determinare a poziției BCT a două sau mai multe verigi: a) grafică - prin adăugarea forțelor gravitaționale și b) analitică - prin adăugarea momentelor forțelor gravitaționale. Cunoscând greutatea legăturilor și razele centrelor lor de greutate, este posibil să se determine aproximativ poziția bct-ului întregului corp.
Din punct de vedere empiric (O. Fisher, N.A. Bernshtein), au fost determinate date medii privind greutatea legăturilor corpului și poziția centrelor lor de greutate. Dacă luăm greutatea corporală ca 100%, atunci greutatea fiecărei legături poate fi exprimată în unități relative (%). La efectuarea calculelor, nu este necesar să se cunoască nici greutatea întregului corp, nici fiecare dintre verigile sale în unități absolute.
Centrele de greutate ale legăturilor sunt determinate fie de repere anatomice (cap, mână), fie de distanța relativă a CG de articulația proximală (raza centrului de greutate face parte din întreaga lungime a membrelor), sau după proporție (tors, picior).
Centrul de greutate al legăturii este determinat de distanța de la acesta la axa articulației proximale - de raza centrului de greutate. Se exprimă relativ la lungimea întregii legături, luată ca unitate, numărând de la articulația proximală (capătul proximal este situat mai aproape de începutul legăturii). Pentru coapsă, este de aproximativ 0,44; pentru piciorul inferior - 0,42; pentru umăr - 0,47; pentru antebraț - 0,42; pentru corp - 0,44 (măsoară distanța de la axa transversală a articulațiilor umărului la axă articulațiile șoldului). Centrul de greutate al capului este situat în regiunea șeii turcești a osului sfenoid (proiecție din față spre suprafața capului - între sprâncene, din lateral - 3-3,5 cm deasupra canalului auditiv extern) . Centrul de greutate al mâinii este situat în zona capului celui de-al treilea os metacarpian, centrul de greutate al piciorului este pe o linie dreaptă care leagă tuberculul calcanean al calcaneului cu capătul celui de-al doilea deget, la o distanta de 0,44 fata de primul punct.
Centrul de greutate comun al întregului corp este un punct imaginar căruia i se aplică rezultanta forțelor gravitaționale ale tuturor legăturilor corpului. La o persoană care stă în poziția principală, planul orizontal care trece prin CCM este aproximativ la nivelul celei de-a doua vertebre sacrale. În poziția culcat, BCM se deplasează spre cap cu aproximativ 1%; la femei, este localizată în medie cu 1-2% mai mică decât la bărbați; la copiii preșcolari, este semnificativ mai mare decât la adulți (de exemplu, la copiii de un an, în medie, cu 15%).
Când postura se schimbă, GCM-ul corpului se schimbă în mod natural și, în unele cazuri, în special atunci când se aplecă înainte și înapoi, poate fi în afara corpului uman.
Pentru a determina poziția CCM al corpului, se folosesc metode experimentale sau de calcul.
Metoda analitică de determinare a GCT se bazează pe adăugarea momentelor gravitaționale conform teoremei Varignon: „Suma momentelor forțelor despre orice centru este egală cu momentul sumei acestor forțe (sau rezultanta) cam în același centru.”
Când postura este stabilită, precum și CG-ul tuturor verigilor corpului sunt determinate și greutățile relative ale acestora sunt cunoscute, se alege în mod arbitrar centrul (punctul O), în raport cu care vor fi determinate momentele de greutate. Acest punct poate fi plasat oriunde, dar este mai convenabil să-l plasați în partea de jos, în stânga desenului, astfel încât toate momentele să fie pozitive.
Din acest punct, sunt trasate axele reciproc perpendiculare OX și OY. Apoi, determinați momentul de greutate al legăturilor corpului. Deoarece forțele gravitației sunt îndreptate vertical în jos, cea mai scurtă distanță dintre punctul O și linia de acțiune a gravitației, de exemplu, piciorul, va fi segmentul Ox1, adică x1 este coordonata CG a piciorului. .
Prin definiție, cea mai scurtă distanță dintre centrul unui moment și linia de acțiune a unei forțe este brațul acelei forțe. Prin urmare, putem presupune că momentul de greutate al piciorului în raport cu punctul O de-a lungul axei X este Mst = P1 Ox1.
În același mod, este posibil să se determine momentele forțelor gravitaționale ale legăturilor rămase, care sunt egale cu produsul greutății relative (Рv.) a legăturii cu coordonata x a CG a acestei legături. În general, formula va arăta astfel:
Mzvena \u003d Rzvena hzvena.
Acum scriem suma acestor momente de forțe conform teoremei Varignon:
Р1х1 + Р2х2 + ... + Рnхn = (Р1 + Р2 + ... + Рn) Х, sau
Рiхi = (Рi) X. (1)
În partea stângă a ecuației - suma momentelor de greutate ale tuturor legăturilor corpului în raport cu O de-a lungul axei X, iar în dreapta - momentul rezultantei lor Pi
Dintre toate mărimile ecuației, nu se cunoaște decât valoarea lui X, care este coordonata x a aplicării forței rezultante Pi, adică coordonata x a BCT.
Din (1) determinăm:
În același mod, înlocuind în ecuația (13) în loc de coordonatele x ale CG leagă coordonatele lor y, găsim coordonata Y a CCG a întregului corp:
După ce s-au determinat coordonatele unui punct, este ușor să găsim locația acestuia prin trasarea a două drepte reciproc perpendiculare din punctele X și Y. Astfel, se determină și punctul bct al corpului uman.
Să trecem la calcule pentru a determina poziția centrului general de greutate al corpului.
1. Redesenați poziția schematică. Să determinăm lungimea legăturilor corpului pe BSL.
Măsurăm lungimea fiecărei legături cu o riglă și scriem rezultatele (în mm) în coloana nr. 2 (vezi tabelul 2).
2. Determinați centrele de greutate ale legăturilor.
Centrele de greutate ale capului și trunchiului sunt determinate de repere anatomice.
Pentru a determina locația CG a legăturilor rămase, se folosesc datele razelor centrelor de greutate (k).
tabelul 1
Numele legăturilor corpului | Greutatea relativă a legăturilor corpului | Valoarea relativă CG* a legăturii (k) |
trunchiul | ||
Umărul drept | ||
Umărul stâng | ||
Presumă. dreapta | ||
Presumă. stânga | ||
Mana dreapta | ||
Mâna stângă | ||
Coapsa dreaptă | ||
Coapsa stângă | ||
Partea de jos a piciorului drept | ||
Partea de jos a piciorului stâng | ||
Piciorul drept | ||
Piciorul stâng |
Pentru a face acest lucru, este necesar să înmulțiți lungimea legăturii (l) cu valoarea corespunzătoare a razei centrului de greutate:
Scriem valoarea lui r pentru fiecare link în tabelul 2 coloana 3.
Rezultatul obținut va fi amânat de la articulația proximală.
De exemplu, pentru a determina CT al umărului, este necesar să se înmulțească lungimea legăturii ab cu 0,47 (k = 0,47): xpl = ab 0,47. Amânați rezultatul de la punctul a (articulația umărului); marcați punctul A1.
Să desemnăm toate punctele corespunzătoare centrelor de greutate cu litere mari (A1, A2 - CG al umărului drept și stâng, B1, B2 - CG al antebrațului drept și stâng etc.).
3. Pe imaginea cu legături CG aplicate, vom construi sistemul de coordonate XOY.
4. Determinați coordonatele x și y ale CG ale legăturii corespunzătoare prin scăderea perpendicularelor din punctele (A1, A2, B1 etc.) pe axa de coordonate. Să punem datele într-un tabel. Pentru centrul de greutate al capului și al mâinii, coordonatele sunt de asemenea determinate și introduse în tabel.
3. Calculați momentele de greutate ale fiecărei legături pixi și piyi, adică înmulțind coordonatele cu valoarea corespunzătoare a greutăților lor relative. Să-l punem într-un tabel.
4. Adăugați momentele forțelor gravitaționale ∑pixi. și ∑piyi (separat de-a lungul axei x și y).
5. Calculați coordonatele CM folosind formulele (2) și (3) .
6. Să trasăm poziția CCG în funcție de coordonatele găsite în raport cu originea.
Tabel pentru calcularea coordonatelor GRC (Tabelul 2)
Lungimea legăturii (l, mm) | valoarea r | ||||||
Cap (C) | |||||||
Tors (T) | |||||||
Umăr drept (А1) | |||||||
Umăr stâng (А2) | |||||||
Presumă. dreapta (B1) | |||||||
Presumă. Stânga (B2) | |||||||
Mâna dreaptă (B1) | |||||||
Mâna stângă (B2) | |||||||
Coapsa dreaptă (D1) | |||||||
Coapsa stângă (D2) | |||||||
Partea de jos a piciorului dreapta (G1) | |||||||
Partea de jos a piciorului stâng (G2) | |||||||
Picior dreapta (K1) | |||||||
Picior stâng (K2) | |||||||
A întregului corp |
Acum, folosind coordonatele X și Y găsite, determinăm punctul bct al corpului uman.
Opțiunea numărul 2
Intrebarea 1
Dați definiții ale principalelor caracteristici spațiale ale mișcărilor.
Caracteristicile spațiale vă permit să determinați care sunt pozițiile inițiale și finale în timpul mișcării (coordonate), care este diferența dintre ele, cât de mult s-au schimbat (deplasare) și prin ce poziții intermediare a fost efectuată mișcarea (traiectorie), adică. caracteristicile spațiale în ansamblu determină forma spațială a mișcărilor umane.
Coordonata unui punct este o măsură spațială a locației unui punct în raport cu un sistem de referință.
Din punct de vedere al mecanicii, a descrie mișcarea înseamnă a determina poziția în orice moment în timp, a determina coordonatele punctelor de identificare ale corpului, prin care se studiază cursul mișcării în spațiu.
Coordonatele determină locul în care se află punctul studiat în raport cu originea, prin măsurarea coordonatelor sale liniare. Poziția unui punct pe o dreaptă este determinată de o coordonată, pe un plan - doi, în spațiu - trei.
La studierea mișcării este necesar să se determine: 1) poziția inițială de la care începe mișcarea; 2) poziția finală în care se încheie mișcarea; 3) un număr de poziții intermediare instantanee pe care corpul le ia atunci când efectuează o mișcare.
Mișcarea unui punct este o măsură spațială a schimbării locației unui punct într-un cadru de referință dat.
Deplasarea este o mărime vectorială. Se caracterizează printr-o valoare numerică (modul) și direcție, i.e. determină domeniul și direcția mișcării. Dacă, după mișcare, punctul a revenit în poziția inițială, deplasarea este zero. Astfel, mișcarea nu este mișcarea în sine, ci doar rezultatul final al acesteia - distanța în linie dreaptă și direcția de la poziția inițială la cea finală.
Mișcarea (liniară, în mișcare de translație) se măsoară prin diferența de coordonate în momentele începutului și sfârșitului mișcării.
Mișcarea corpului în timpul mișcării de rotație este măsurată prin unghiul de rotație - diferența de coordonate unghiulare în același sistem de referință de distanță.
Traiectoria unui punct este o măsură spațială a mișcării (o urmă imaginară a mișcării unui punct). Traiectoria este determinată prin stabilirea lungimii, curburii și orientării sale în spațiu.
Modelul spațial al mișcării unui punct este dat de traiectoria acestuia. Lungimea traiectoriei arată care este calea punctului.
Descrierea muncii
Determinarea poziției centrului general de greutate al corpului în mod analitic.
Sarcini principale: 1) să învețe să determine poziția centrelor de greutate a legăturilor (CG);
2) învață să determine poziția centrului general de greutate al corpului (GCT).
Centrul de masă al unui corp rigid este un punct fix bine definit care nu își schimbă poziția față de corp. Centrul de masă al unui sistem de corpuri (corpul uman este un sistem biomecanic format din legături) își poate schimba poziția dacă distanțele dintre punctele acestui sistem se modifică.
În biomecanică, se disting centrele de masă ale legăturilor individuale ale corpului (de exemplu, piciorul inferior sau antebrațul) și centrul de masă al întregului corp.
Centrul de greutate al unei legături este un punct imaginar căruia i se aplică rezultanta forțelor gravitaționale ale tuturor particulelor legăturii. Momentele tuturor forțelor gravitaționale ale unui Even în raport cu CG-ul său sunt echilibrate reciproc, suma lor este egală cu zero. Aceasta presupune două metode de determinare a poziției BCT a două sau mai multe verigi: a) grafică - prin adăugarea forțelor gravitaționale și b) analitică - prin adăugarea momentelor forțelor gravitaționale. Cunoscând greutatea legăturilor și razele centrelor lor de greutate, este posibil să se determine aproximativ poziția bct-ului întregului corp.
Din punct de vedere empiric (O. Fisher, N.A. Bernshtein), au fost determinate date medii privind greutatea legăturilor corpului și poziția centrelor lor de greutate. Dacă luăm greutatea corporală ca 100%, atunci greutatea fiecărei legături poate fi exprimată în unități relative (%). La efectuarea calculelor, nu este necesar să se cunoască nici greutatea întregului corp, nici fiecare dintre verigile sale în unități absolute.
Centrele de greutate ale legăturilor sunt determinate fie de repere anatomice (cap, mână), fie de distanța relativă a CG de articulația proximală (raza centrului de greutate face parte din întreaga lungime a membrelor), sau după proporție (tors, picior).
Centrul de greutate al legăturii este determinat de distanța de la acesta la axa articulației proximale - de raza centrului de greutate. Se exprimă relativ la lungimea întregii legături, luată ca unitate, numărând de la articulația proximală (capătul proximal este situat mai aproape de începutul legăturii). Pentru coapsă, este de aproximativ 0,44; pentru piciorul inferior - 0,42; pentru umăr - 0,47; pentru antebraț - 0,42; pentru trunchi - 0,44 (măsoară distanța de la axa transversală a articulațiilor umărului la axa articulațiilor șoldului). Centrul de greutate al capului este situat în regiunea șeii turcești a osului sfenoid (proiecție din față spre suprafața capului - între sprâncene, din lateral - 3-3,5 cm deasupra canalului auditiv extern) . Centrul de greutate al mâinii este situat în zona capului celui de-al treilea os metacarpian, centrul de greutate al piciorului este pe o linie dreaptă care leagă tuberculul calcanean al calcaneului cu capătul celui de-al doilea deget, la o distanta de 0,44 fata de primul punct.
Centrul de greutate comun al întregului corp este un punct imaginar căruia i se aplică rezultanta forțelor gravitaționale ale tuturor legăturilor corpului. La o persoană care stă în poziția principală, planul orizontal care trece prin CCM este aproximativ la nivelul celei de-a doua vertebre sacrale. În poziția culcat, BCM se deplasează spre cap cu aproximativ 1%; la femei, este localizată în medie cu 1-2% mai mică decât la bărbați; la copiii preșcolari, este semnificativ mai mare decât la adulți (de exemplu, la copiii de un an, în medie, cu 15%).
Când postura se schimbă, GCM-ul corpului se schimbă în mod natural și, în unele cazuri, în special atunci când se aplecă înainte și înapoi, poate fi în afara corpului uman.
Pentru a determina poziția CCM al corpului, se folosesc metode experimentale sau de calcul.
Metoda analitică de determinare a GCT se bazează pe adăugarea momentelor gravitaționale conform teoremei Varignon: „Suma momentelor forțelor despre orice centru este egală cu momentul sumei acestor forțe (sau rezultanta) cam în același centru.”
Când postura este stabilită, precum și CG-ul tuturor verigilor corpului sunt determinate și greutățile relative ale acestora sunt cunoscute, se alege în mod arbitrar centrul (punctul O), în raport cu care vor fi determinate momentele de greutate. Acest punct poate fi plasat oriunde, dar este mai convenabil să-l plasați în partea de jos, în stânga desenului, astfel încât toate momentele să fie pozitive.
Din acest punct, sunt trasate axele reciproc perpendiculare OX și OY. Apoi, determinați momentul de greutate al legăturilor corpului. Deoarece forțele gravitației sunt îndreptate vertical în jos, cea mai scurtă distanță dintre punctul O și linia de acțiune a forței gravitaționale, de exemplu, piciorul, va fi segmentul Ox 1, adică x 1 este coordonata lui CG-ul piciorului.
Prin definiție, cea mai scurtă distanță dintre centrul unui moment și linia de acțiune a unei forțe este brațul acelei forțe. Deci, putem presupune că momentul de greutate al piciorului în raport cu punctul O de-a lungul axei X este egal cu M st \u003d P 1 × Ox 1.
În același mod, este posibil să se determine momentele forțelor gravitaționale ale legăturilor rămase, care sunt egale cu produsul greutății relative (steaua P) a legăturii cu coordonata x a CG a acestei legături. În general, formula va arăta astfel:
M link = P link × x link.
Acum scriem suma acestor momente de forțe conform teoremei Varignon:
P 1 ×x 1 + P 2 ×x 2 + ... + P n ×x n \u003d (P 1 + P 2 + ... + P n) × X sau
еР i ×х i = (еР i) × Х. (1)
În partea stângă a ecuației - suma momentelor de gravitație ale tuturor legăturilor corpului în raport cu O de-a lungul axei X, iar în dreapta - momentul rezultantei lor åР i
Dintre toate mărimile ecuației, doar valoarea X este necunoscută, care este coordonata x a aplicării forței rezultante åР i , adică coordonata x a BCT.
Din (1) determinăm:
În același mod, înlocuind în ecuația (13) în loc de coordonatele x ale CG leagă coordonatele lor y, găsim coordonata Y a CCG a întregului corp:
După ce s-au determinat coordonatele unui punct, este ușor să găsim locația acestuia prin trasarea a două drepte reciproc perpendiculare din punctele X și Y. Astfel, se determină și punctul bct al corpului uman.
Să trecem la calcule pentru a determina poziția centrului general de greutate al corpului.
1. Redesenați poziția schematică. Să determinăm lungimea legăturilor corpului pe BSL.
Măsurăm lungimea fiecărei legături cu o riglă și scriem rezultatele (în mm) în coloana nr. 2 (vezi tabelul 2).
2. Determinați centrele de greutate ale legăturilor.
Centrele de greutate ale capului și trunchiului sunt determinate de repere anatomice.
Pentru a determina locația CG a legăturilor rămase, se folosesc datele razelor centrelor de greutate (k).
tabelul 1
|
Numele legăturilor corpului |
Greutatea relativă a legăturilor corpului |
Valoarea relativă CG* a legăturii (k) |
| Cap | 0,07 | |
| trunchiul | 0,43 | 0,44 |
| Umărul drept | 0,03 | 0,47 |
| Umărul stâng | 0,03 | 0,47 |
| Presumă. dreapta | 0,02 | 0,42 |
| Presumă. stânga | 0,02 | 0,42 |
| Mana dreapta | 0,01 | |
| Mâna stângă | 0,01 | - |
| Coapsa dreaptă | 0,12 | 0,44 |
| Coapsa stângă | 0,12 | 0,44 |
| Partea de jos a piciorului drept | 0,05 | 0,42 |
| Partea de jos a piciorului stâng | 0,05 | 0,42 |
| Piciorul drept | 0,02 | 0 44 |
| Piciorul stâng | 0,02 | 0 44 |
Aceasta necesită o lungime a legăturii ( l ) înmulțit cu valoarea corespunzătoare a razei centrului de greutate:
r= l ×k.
Scriem valoarea lui r pentru fiecare link în tabelul 2 coloana 3.
Rezultatul obținut va fi amânat de la articulația proximală.
De exemplu, pentru a determina CG-ul umărului, aveți nevoie de lungimea legăturii ab înmulțiți cu 0,47 (k = 0,47): x pl = ab × 0,47. Lăsați deoparte rezultatul din punct A (articulația umărului); marca un punct A1 .
Să desemnăm toate punctele corespunzătoare centrelor de greutate cu litere mari (A1, A2 - CG al umărului drept și stâng, B1, B2 - CG al antebrațului drept și stâng etc.).
3. Pe imaginea cu legături CG aplicate, vom construi sistemul de coordonate XOY.
4. Determinați coordonatele Xși y CG al legăturii corespunzătoare, scăzând perpendicularele din punctele (A1, A2, B1 etc.) de pe axa de coordonate. Să punem datele într-un tabel. Pentru centrul de greutate al capului și al mâinii, coordonatele sunt de asemenea determinate și introduse în tabel.
3. Calculați momentele de greutate ale fiecărei verigi p i x i, și p i y i , adică înmulțirea coordonatelor cu valoarea corespunzătoare a greutăților lor relative. Să o scriem într-un tabel. .
4. Adăugați momentele de greutate ∑ p i x i. și ∑ p i y i(separat pe axele x și y).
5. Calculați coordonatele CM folosind formulele (2) și (3).
6. Să trasăm poziția CCG în funcție de coordonatele găsite în raport cu originea.
Tabel pentru calcularea coordonatelor GRC (Tabelul 2)
|
Lungimea link-ului ( l, mm) |
valoarea r |
||||||
| Cap (C) | 92 | 110 | 0,07 | 6,44 | 7,7 | ||
| Tors (T) | 38 | 16.72 | 94 | 76 | 0,43 | 40,42 | 32,68 |
| Umăr drept (А1) | 20 | 9.4 | 116 | 103 | 0,03 | 3,48 | 3,09 |
| Umăr stâng (А2) | 20 | 9.4 | 71 | 89 | 0,03 | 2,13 | 2,67 |
| Presumă. dreapta (B1) | 22 | 9.24 | 134 | 115 | 0,02 | 2,68 | 2,3 |
| Presumă. Stânga (B2) | 22 | 9.24 | 55 | 78 | 0,02 | 1,1 | 1,56 |
| Mâna dreaptă (B1) | 140 | 119 | 0,01 | 1,4 | 1,19 | ||
| Mâna stângă (B2) | 46 | 73 | 0,01 | 0,46 | 0,73 | ||
| Coapsa dreaptă (D1) | 32 | 14.08 | 100 | 40 | 0,12 | 12 | 4,8 |
| Coapsa stângă (D2) | 35 | 15.4 | 76 | 43 | 0,12 | 9,12 | 5,16 |
| Partea de jos a piciorului dreapta (G1) | 34 | 14.28 | 84 | 15 | 0,05 | 4,2 | 0,75 |
| Partea de jos a piciorului stâng (G2) | 13 | 5.46 | 63 | 32 | 0,05 | 3,15 | 1,6 |
| Picior dreapta (K1) | 16 | 7.04 | 75 | 4 | 0,02 | 1,5 | 0,08 |
| Picior stâng (K2) | 18 | 7.92 | 55 | 31 | 0,02 | 1,1 | 0,62 |
| A întregului corp | 89,18 | 64,93 | 1,00 |
Acum, folosind coordonatele X și Y găsite, determinăm punctul bct al corpului uman.